


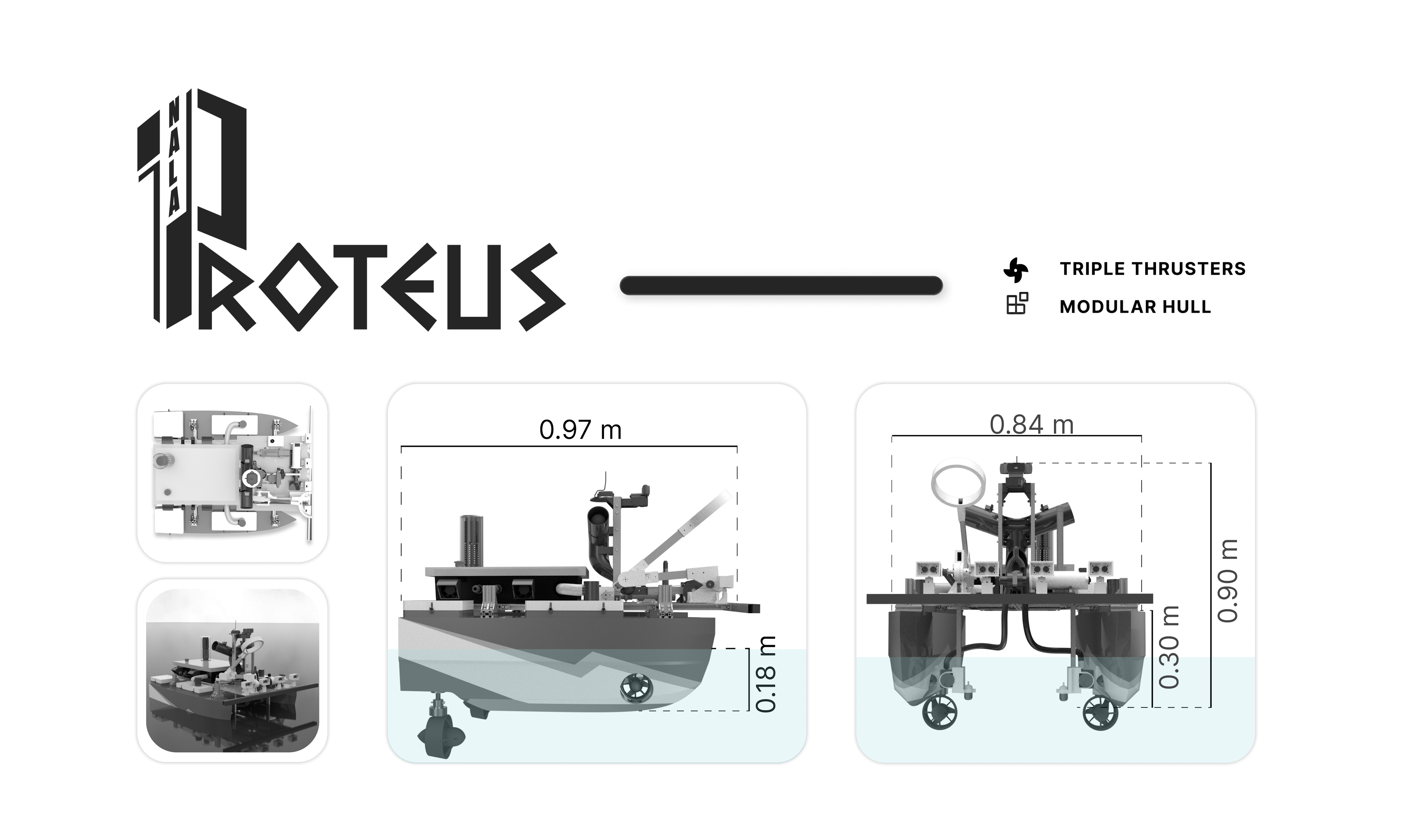
Nala Proteus
An ASV Concept Proposed by Barunastra ITS Team Institut Teknologi Sepuluh Nopember Surabaya, Indonesia
This design is an update from the previous version, Nala Theseus.

Modularity 2.0
There are some new tasks in this year's roboboat like water blast challenge and skeeball game challenge, so we need more flexibility to do quick design iteration.
By having a modular design, the quick design iterations can be easily achieved. Modularity allows our ship to be divided into independent parts. These parts could be created, modified, replaced and exchanged independently with other modules or between different systems. Moreover, a modular design allows us to ship the ASV as a flight baggage by splitting the ASV into parts that fit the dimension requirement for baggage.
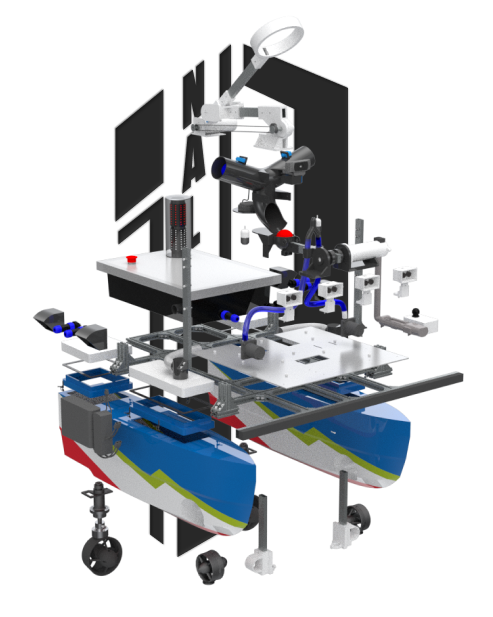
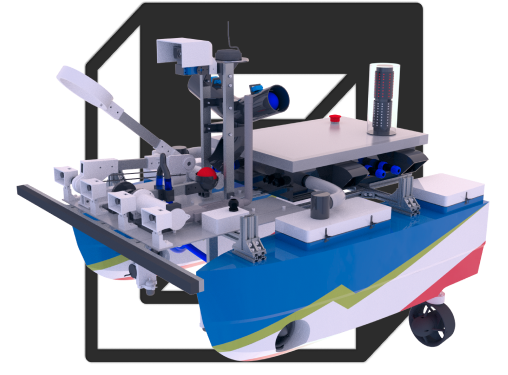
Proteus 3D Model
Simulation
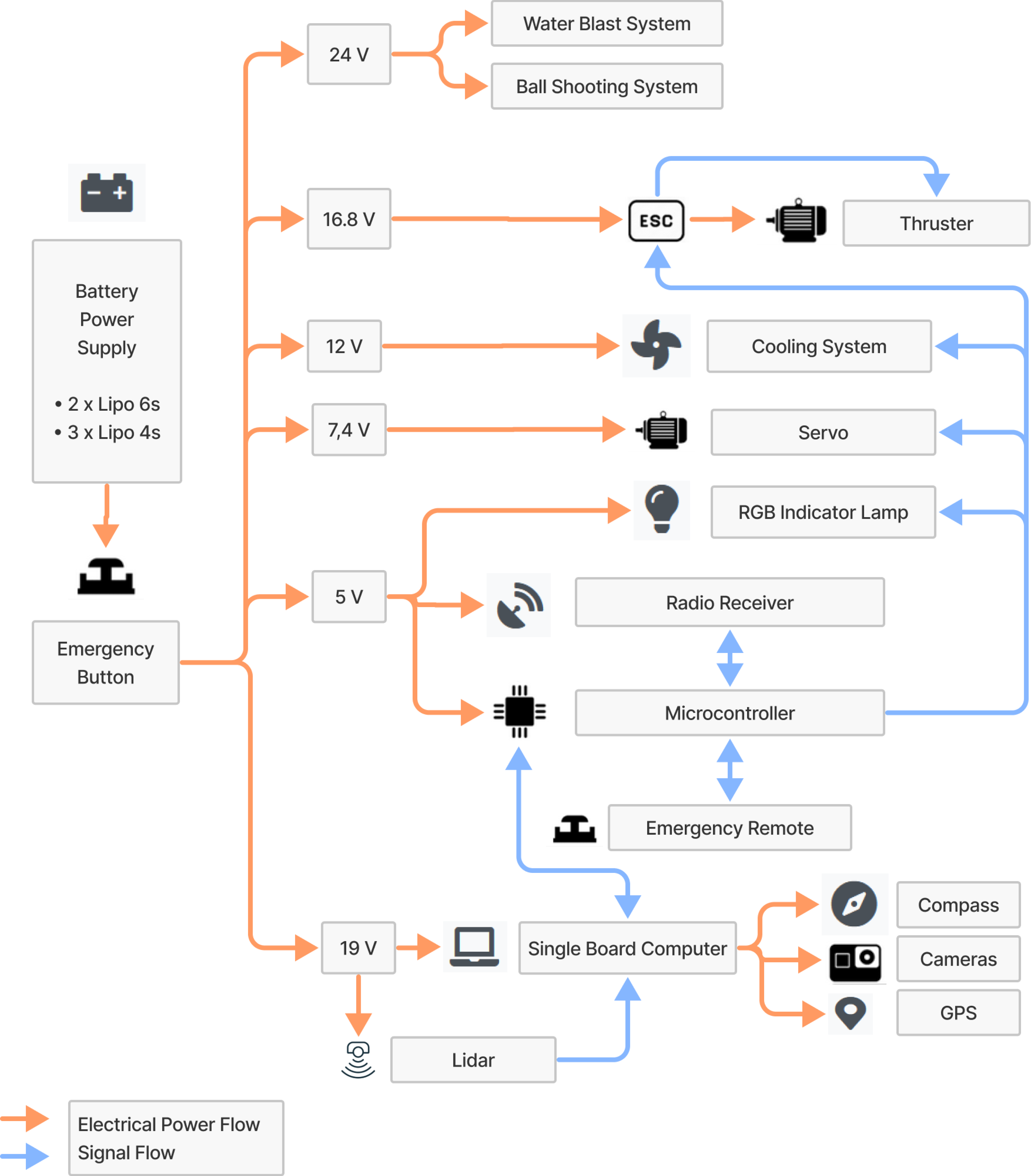
Electrical System Diagram
Build Progress
January
WEEK 1
HULL PRODUCTION
we no longer use 3d prints as negatives because of their imprecision. As alternative, we chose to use a mix of plywood framing methods with glass as the negative print. Fiberglass is used as hull skin and painted for aesthetic needs

WEEK 2
ASSEMBLY and ELECTRICAL INSTALATION
the hull and aluminum frame are connected to each other and mount all the mechanical components. Then, the electrical components are installed and tested for all its functionalities to support all commands to Nala Proteus actuators.
WEEK 3
BUILDING THE ARENA
The arena is cucial fot the testing and trial, therefore it is important to make the arena model as close as possible to the original dimensions of those in the race venue. The arena that we made utilize the materials left in our workshop to save costs and at the same time be environmentally friendly. We plan the arena model to be long-term and weather-resistant in Indonesia's rainy season.
WEEK 4
TRIAL AND ERROR
When the ship has been assembled and the arena has been installed, we conduct a technical triai to get the evaluate the performance of the ASV system. This stage will continue until the race day. In this phase, the weather and time is a double-sided knife that can help and hinder the process of testing our ships.

February
WEEK 1
ROW ROW ROW
The Ship are still under , their actual continuous iteration. The performance is analyzed by visual measures to compare with simulation data. afterwards, the data is collected and processed into both written and audio-visual output. The obstacle that come is the most challenging since we are obliged to shift our time and strategy to administer the research, academic responsibility, and health of our team members.

Trials
Against the Weather Most of the time!
Trials against weather conditions were done most of the time, despite heavy rain and strong winds. These extreme conditions instead proves Nala Proteus’ operational security by the safety of the electrical components and the ASV’s ability to keep on going. AHOY!
Object Detection
YOLOv4 is a cutting-edge object detection algorithm that can be used in roboboat to detect objects in real-time. This improves safety and efficiency by allowing the roboboat to quickly respond to its environment and make decisions. YOLOv4 also allows for real-time adaptation and learning.
Magallan's Route
Testing for Magallan’s Route was done from the 1st to the 5th of February 2023. Our ASV’s object detection capabilities are tested to complete this task. Iterations were done at various times in the day to observe different object detection responses in different lightings. Results indicate that Nala Proteus is able to pass through each gate from start to finish despite the occasional nudge against the buoys and overlapping.
Ponce de Leon
This trial is intended to test the ASV on the “Ponce de Leon” task. It was done on February 6-8, 2023 and conducted in the model arena, which our team has assembled at our local lake. On these trial days, we have supportive weather with relatively calm water. The result of the testing shows that Nala Theseus can aim and fill the water tank despite being unable to carry it out to completion and difficulties are present in maintaining its stationary position. Therefore, further iterations need to be done.
"The ocean is a journey not for the faint of heart, a test of bravery and determination."
Unknown